

聚焦科研|面向城市燃气管道内检测的智能微机器系统
发布时间:
2025-07-15
所属分类:
新闻资讯
城市地下管网作为城市基础设施的核心组成部分,其安全稳定运行直接关系到民生保障和城市韧性提升。当前,传统检测技术在应对深埋管道高精度内检测需求时面临诸多挑战,尤其在复杂工况适应性、三维测绘定位及数字化建模等方面存在显著局限性。针对这一行业技术瓶颈,北京大学南昌创新研究院(以下简称“北大南昌院”) 面向城市燃气管道内检测的智能微机器系统项目组(以下简称“项目组”)通过系统性技术创新,自主研发了具有完整自主知识产权的智能化管道机器人系统,为城市燃气管道安全运维提供了创新解决方案。
项目组以燃气、石油化工等领域的管道内检测技术研发为核心,重点攻关管道三维数据建模与智能运维系统建设。在成功突破自适应变径、多传感器融合、数字孪生等核心技术的基础上,研究团队紧密结合燃气行业实际运维需求,通过多场景实地测试验证了机器人在不同管径、复杂工况条件下的运行可靠性,并基于实测数据持续优化技术标准体系,为行业技术升级提供了重要支撑。
PART.01 智能巡检赋能管道运维
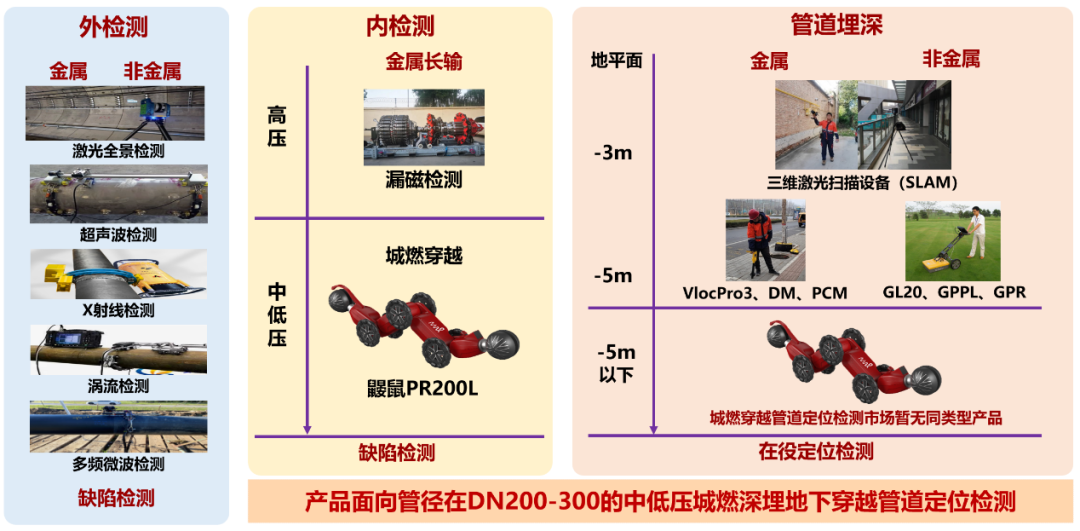
图1 管道机器人研究背景
针对城市燃气、给排水等地下管道存在的腐蚀泄漏、施工破坏、定位不准等安全隐患,管道机器人系统聚焦中低压深埋穿越管道的高精度内检测需求,填补了传统外检测技术无法在地埋金属、非金属管道,和带压环境下检测的技术空白。通过“机器人+智能传感+数字孪生”技术组合,实现管道“精准定位-缺陷检测-三维建模-智能运维”全流程闭环,为城市管网安全提供“非开挖式”智能解决方案。针对城燃管道、可适配石油化工管道、供暖给排水管道等应用场景,管道机器人凭借小型化、高通过性、高可靠性等优势,可精准解决管道内有限空间检测难题,实现复杂环境下管道状态全方位监测。
PART.02 技术突破引领行业革新
在技术创新方面,管道机器人展现出多项核心突破。定位技术上,通过多传感融合补偿技术,集成轮式里程计、惯性测量单元与自研算法,有效抑制长距离检测的定位漂移,降低误差;针对长直管道视觉特征少、惯性测量单元积分误差的问题,开发特征增强算法与实时校准模型,进一步提升缺陷定位精度。集成多模态传感器构建实时环境建模与智能决策系统,能自动识别障碍物并规划规避或清除策略。结合地形感知动态调整参数,实现地形与模式联动控制、牵引力动态调节及姿态稳定控制,确保在各类管道环境中稳定运行。管径自适应设计则通过弹性支撑与模块化分段机身,自动调整张开度,平衡机械复杂度与可靠性。虚拟验证技术借助仿真平台构建虚拟管道环境,快速验证算法有效性,缩短研发周期、降低研发风险。

图2 管道机器人
PART.03 前瞻布局服务国家战略
该管道机器人系统通过创新性集成机械设计、传感检测、智能算法与虚拟仿真技术,构建了模块化、智能化的管道检测技术体系,实现了多管径复杂环境下的全生命周期数字化监测与管理。目前,系统已在新奥廊坊实训基地、北京昌平零偏基地等场景实现成功应用,通过高精度的视频巡检、精准定位及三维建模功能,为管网安全评估提供了关键数据支撑,显著提升了检测效率并有效降低了人工成本。
在国家大力推进高端装备国产化与核心技术自主创新的战略指引下,北大南昌院项目组立足国家重大需求,持续深化智能算法优化与多场景应用适配等关键技术攻关,着力提升系统的自主可控水平。未来,团队将紧密围绕国家基础设施智能化战略部署,以科技创新驱动行业标准制定与产业生态培育,切实履行服务国家能源安全与城市安全发展的科研使命,为我国新型城镇化建设和地下空间智慧化管理贡献关键技术力量。

黄天云 项目负责人
黄天云,现任北京大学工学部先进制造与机器人学院助理教授/博士生导师、北京大学机器人研究中心副主任、新奥工学青年杰出学者、博雅青年学者、国家级青年人才。黄天云教授致力于复杂受限空间下机器人微型化与智能化基础理论与关键技术,研究成果在Nature、Nature Machine Intelligence、Nature Communications、Science Advances等国际期刊上发表,受邀为《光明日报》科技版撰写署名文章。重要成果被Nature正刊、Materials Today等焦点评论,瑞士联邦理工学院ETH Zurich与瑞士国家实验室PSI网站头版报道,以及Physics World、国家基金委、科学网等近40余家国内外主流科技媒体报道。已主持或参与科技部国家重点研发计划重点专项、国家自然基金重大研究计划、北京市自然科学基金重点项目等科研项目30余项。

企业邮箱:
企业地址
江西省南昌市高新区艾溪湖北路269号高层次人才产业园10栋
关注我们
